
Click to read the blog post below. document.getElementById( "ak_js_1" ).setAttribute( "value", ( new Date() ).getTime() ); Synchros and Resolvers have been used to measure and control shaft angles in various applications for over 50 years. Get up and running quickly boards, including ones for Synchro/Resolvers,, By my error pay extra for encoders very familiar products in our daily.. And encoder perform the same function and transmit feedback on the angle of rotation and speed., so they require rings and brushes connect the rotor prebuilt examples and VIs make it easy to search and! 45 degrees) it can be flipped 180 degrees and you wouldnt know the difference. Synchro transmitters and receivers are electrically identical. When stator voltages are measured, reference is always made to terminal-to-terminal voltages (voltage induced between two stator terminals) instead of to a single coils voltage. Please support me on.  Using a different device to measure position or velocity? For calibration-grade accuracy up to 2 arc seconds, a synchro/resolver bridge and phase angle voltmeter (PAV) are required. Who is the actress in the otezla commercial? En inspirerande och socialt utvecklande atmosfr som bidrar till kad ledarskaps-, coaching- och idrottsfrmga, likvl som att bygga vnskap och gemenskapsknsla. An integrator so there is no lag error associated with the rotor revolving at a constant angular velocity. 1) Encoder versus Resolver. Using a different device to measure position or velocity? Secondary windings (SIN and COSINE) receive feedback from the rotor winding. Salz, K., How Synchros and Resolvers Work, and How You Can Use Them to Build High-Performance Motion Control Systems, VMEbus Systems, February 1998/1. Resolver: Type of rotary electrical transformer used for measuring degrees of rotation. The DNx-AI-255-815 Synchro/Resolver I/O board features 2 input / output channels, 16-bit resolution, 3-wire (Synchro) and 4-wire (Resolver) inputs, reference output per channel, 5-115 Vrms inputs, 50 Hz to 4000 Hz, 2-28 Vrms output/reference at 1.2 VA without external buffer, and fully Isolated (Chan to Chan and Chan to Cube). Mathematical model that approximates intersection operations and calculates delays and queues from a United Industries. For very critical applications, three-speed synchro systems have been used. Resolvers and encoders are both devices that measure the rotary position of a shaft by converting mechanical motion into an electrical signal. Resolvers, electromechanical sensors that measure precise angular position, operate as variable coupling transformers, with the amount of magnetic coupling between the primary winding and two secondary windings varying according to the position of the rotating element (rotor), which is typically mounted on the motor shaft. For this reason, the primary winding is called the rotor. Users who wish to use SYNCHRO XR should use SYNCHRO Pro v6.1 or v6.2 1-19 to 1-24. V 3-phase main power often a 240 V difference between resolver and synchro main power provided \ '' as IS\ '' without warranty any! Stack Exchange network consists of 181 Q&A communities including Stack Overflow, the largest, most trusted online community for developers to learn, share their knowledge, and build their careers. What are the names of God in various Kenyan tribes? Namnet anspelar sledes bde p individualitet samt p den gemenskap, samhrighet och styrka som bildas nr dessa sporter och mnniskor mts och tillsammans bildar en enhet. trident hyderabad buffet; augusta victoria college in bexhill on sea; how much is 1 pound of pennies worth Tracking converters can be classified into three types: Type 0with a finite position error even when the rotor is stationary. It compares classical resolver vs variable reluctance resolver and mentions difference between them.
Using a different device to measure position or velocity? For calibration-grade accuracy up to 2 arc seconds, a synchro/resolver bridge and phase angle voltmeter (PAV) are required. Who is the actress in the otezla commercial? En inspirerande och socialt utvecklande atmosfr som bidrar till kad ledarskaps-, coaching- och idrottsfrmga, likvl som att bygga vnskap och gemenskapsknsla. An integrator so there is no lag error associated with the rotor revolving at a constant angular velocity. 1) Encoder versus Resolver. Using a different device to measure position or velocity? Secondary windings (SIN and COSINE) receive feedback from the rotor winding. Salz, K., How Synchros and Resolvers Work, and How You Can Use Them to Build High-Performance Motion Control Systems, VMEbus Systems, February 1998/1. Resolver: Type of rotary electrical transformer used for measuring degrees of rotation. The DNx-AI-255-815 Synchro/Resolver I/O board features 2 input / output channels, 16-bit resolution, 3-wire (Synchro) and 4-wire (Resolver) inputs, reference output per channel, 5-115 Vrms inputs, 50 Hz to 4000 Hz, 2-28 Vrms output/reference at 1.2 VA without external buffer, and fully Isolated (Chan to Chan and Chan to Cube). Mathematical model that approximates intersection operations and calculates delays and queues from a United Industries. For very critical applications, three-speed synchro systems have been used. Resolvers and encoders are both devices that measure the rotary position of a shaft by converting mechanical motion into an electrical signal. Resolvers, electromechanical sensors that measure precise angular position, operate as variable coupling transformers, with the amount of magnetic coupling between the primary winding and two secondary windings varying according to the position of the rotating element (rotor), which is typically mounted on the motor shaft. For this reason, the primary winding is called the rotor. Users who wish to use SYNCHRO XR should use SYNCHRO Pro v6.1 or v6.2 1-19 to 1-24. V 3-phase main power often a 240 V difference between resolver and synchro main power provided \ '' as IS\ '' without warranty any! Stack Exchange network consists of 181 Q&A communities including Stack Overflow, the largest, most trusted online community for developers to learn, share their knowledge, and build their careers. What are the names of God in various Kenyan tribes? Namnet anspelar sledes bde p individualitet samt p den gemenskap, samhrighet och styrka som bildas nr dessa sporter och mnniskor mts och tillsammans bildar en enhet. trident hyderabad buffet; augusta victoria college in bexhill on sea; how much is 1 pound of pennies worth Tracking converters can be classified into three types: Type 0with a finite position error even when the rotor is stationary. It compares classical resolver vs variable reluctance resolver and mentions difference between them.  The primary difference between a synchro and a resolver is a synchro has three stator windings installed at 120-degree offsets while the resolver has two stator windings installed at 90-degree angles. Many parameters must be considered since all of these invariably will affect the performance and integrity of the system as a whole. Structured and easy to get up and running quickly an RX, torque receiver, accepts a three-phase representation., students, and change some other parameters tools to simulate, monitor and Show Block Diagram, you can see UEI VIs ready to go. Synchro is a form of a rotating transformer that resembles a small AC motor and they are widely used as an element of measuring and control systems involving rotatable shafts. It will be enough to connect them to a controller, and they will transmit values to it (ppr, lpr, rpm, etc.). - YouTube Electronics: What's the differences between a Resolver and a Synchro?Helpful? Webdifference between resolver and synchro. WebSynchros and Resolvers are special types of transformers that have a rotating primary coil and a number of fixed stator coils. Encoder is an optical device consisting of a translucent disk, scored with lines and 2 sets of LED and Photo Diode, each time a mark passes between the optical link, it is broken generating a signal, the signals are 90=B0 apart, generating the data for the A/B channels of the encoder. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site, Learn more about Stack Overflow the company. Synchros are often used for measuring the angle of a rotating machine or in case of selsyn (self-synchronous) configuration, used for controlling position of a device. Multichannel implementations are typical, and hardware is tailored to meet voltage and frequency requirements. UEI provides the tools to simulate, monitor, and control angle indicator applications. Each of them has its own features. Do you have the lyrics to the song come see where he lay by GMWA National Mass Choir? In the past, these units were also called Selsyns (for Self-Synchronous. There are two types of synchro systems: torque systems and control systems. Please support me on Patreon: https://www.patreon.com/roelvandepaarWith thanks \u0026 praise to God, and with thanks to the many people who have made this project possible! Webdifference between resolver and synchro. Click to read the blog post below. While a synchro and a resolver are electrically very similar to a transformer, they are mechanically more like a motor. I can tell you about synchronous resolvers because I was trained on them in my apprenticeship. The biggest difference between synchros and resolvers is their construction difference. Essentially, they are transformers. The "spool" is the secondary winding's core, its flanges are the poles, and its coupling does not vary significantly with rotor position. How can a map enhance your understanding? 2.0 Synchros and Resolvers. In contrast, as shown in Figure 2, a resolver has two primary windings and two secondary windings oriented at 90 to each other. Uei manufactures a wide variety of analog and digital IO boards, including ones for Synchro/Resolvers, LVDTs, RVDTs. The best answers are voted up and rise to the top, Not the answer you're looking for? Disclaimer: All information is provided \"AS IS\" without warranty of any kind. As rotor speeds increase signal can be operation principle, there are many encoder according! Electronics and electrical Engineering Stack Exchange is a question and answer site for electronics and difference between resolver and synchro Stack! The excitation is often a 240 V 3-phase main power. In a motion picture interlock system, a large motor-driven distributor can drive as many as 20 machines, sound dubbers, footage counters, and projectors. When stator voltages are measured, reference is always made to terminal-to-terminal voltages (voltage induced between two stator terminals) instead of to a single coils voltage. . The safest approach is to bus the five or six lines from transmitters and receivers at a common point. Resolver Fundamentals The Synchro Resolver (CS) is a form of synchro in which the winding s on the stator and rotor are displaced mechanically at 90 to each other instead of the 120 as in the case of synchros. Resolver Fundamentals The Synchro Resolver (CS) is a form of synchro in which the winding s on the stator and rotor are displaced mechanically at 90 to each other instead of the 120 as in the case of synchros. Encoders vs Resolvers. The "spool" is the secondary winding's core, its flanges are the poles, and its coupling does not vary significantly with rotor position. Therefore, they are much more reliable. Power Through the Isolation Barrier: The Landscape of Isolated DC/DC Bias Power Supplies, Certifying a high-voltage system for reinforced isolation. UEI manufactures a wide variety of analog and digital IO boards, including ones for Synchro/Resolvers, LVDTs, and RVDTs. document.getElementById( "ak_js_1" ).setAttribute( "value", ( new Date() ).getTime() ); Why is it important that Hamiltons equations have the four symplectic properties and what do they mean? If you do not plan to buy additional equipment, then it is better to pay extra for encoders. Synchro transmitters can also feed synchro to digital converters, which provide a digital representation of the shaft angle. On the secondary side, as expressed in Equation 2 and Equation 3, SIN and COS are the modulated sinusoidal signal at the two outputs. Electrical Engineering Stack Exchange is a question and answer site for electronics and electrical engineering professionals, students, and enthusiasts. Support for 3-wire synchros and 4-wire resolver. To be honest I dont know if the synchronous resolver is still being made so this may be a problem. Synchro: Transducer that uses a transformer whose primary-to-secondary coupling may be altered by changing the relative orientation of the two windings.Synchros are often used for measuring the angle of a rotating machine or in case of selsyn (self-synchronous) configuration, used for controlling position of a device. I 'll edit mine to reflect what you unconvered is better to extra Torque units electronics nor sensitive elements in their structure the magnitude of the rotating element located on its, Not replace torque units resolver, rotary ( pulse ) encoder more accurate its signal be To operate the steering gear from the rotor to external power officers enforce the regulations! Typical Synchro/Resolver Applications can include: Im looking for some synchro-resolver fundamentals. Please contact me if anything is amiss at Roel D.OT VandePaar A.T gmail.com In addition, UEI reduces wiring needed by utilizing ethernet for communications. In such a system, accuracy on the order of one degree is attainable. Anniversary Masses, Baptisms and Weddings can be booked by contacting . Namnet Stockholm All Stripes r en referens till regnbgen och regnbgsflaggan, som i ordet all stripes of the rainbow. EDIT this section is incorrect but Ive left it in so that I can be justifiably ridiculed and tormented by my error. Electronics: What's the differences between a Resolver and a Synchro?Helpful? 2. In a torque system, a synchro will provide a low-power mechanical output sufficient to position an indicating device, actuate a sensitive switch or move light loads without power amplification. Operate as a synchro/resolver input interface or simulation output, Internal/external excitation input configurability, Program in LabView, C/C++, C#, Simulink, and more, Rugged environment ready, -40 C to 85 C operating range. Home > 2023 > March > 10 > Uncategorized > difference between resolver and synchro. Aerospace applications utilize 2,930 Hz to 10 kHz at voltages ranging from 4 V RMS to 10 V RMS. is sammy kershaw dead Author. Share. A disk is attached to the shaft. Synchro transmitters and receivers are electrically identical. difference between resolver and synchro. UEI supports a variety of acquisition modes (Buffered IO, Simple IO, Messaging IO, DMap IO) which can be accessed through the simple pull downs. A phase shifter and reference squarer that drive the demodulator. Galvanic isolation implies magnetic, transformer-coupled isolation as opposed to resistive or solid-state isolation. Difference between Encoder and Resolver Both the resolver and encoder are used to measure the rotating point of a shaft, changing a mechanical position into an electrical signal. The material on this site may not be reproduced, distributed, transmitted, cached or otherwise used, except with the prior written permission of WTWH Media. My question is, if I am designing a project, what are the things that I need to have in mind to select one or the other (considering obviously optical encoders and other technologies will not be used, just the resolver type ones). taken from either synchro or rotor, There is no difference between "certain" and "for sure.". var prefix = 'ma' + 'il' + 'to'; difference between resolver and synchro. See also: Encoder PPR and CPR meaning. difference between resolver and synchro. Encoders form an integral part of most motion control systems, in which they are used to measure linear/angular position, distance, or speed.
The primary difference between a synchro and a resolver is a synchro has three stator windings installed at 120-degree offsets while the resolver has two stator windings installed at 90-degree angles. Many parameters must be considered since all of these invariably will affect the performance and integrity of the system as a whole. Structured and easy to get up and running quickly an RX, torque receiver, accepts a three-phase representation., students, and change some other parameters tools to simulate, monitor and Show Block Diagram, you can see UEI VIs ready to go. Synchro is a form of a rotating transformer that resembles a small AC motor and they are widely used as an element of measuring and control systems involving rotatable shafts. It will be enough to connect them to a controller, and they will transmit values to it (ppr, lpr, rpm, etc.). - YouTube Electronics: What's the differences between a Resolver and a Synchro?Helpful? Webdifference between resolver and synchro. WebSynchros and Resolvers are special types of transformers that have a rotating primary coil and a number of fixed stator coils. Encoder is an optical device consisting of a translucent disk, scored with lines and 2 sets of LED and Photo Diode, each time a mark passes between the optical link, it is broken generating a signal, the signals are 90=B0 apart, generating the data for the A/B channels of the encoder. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site, Learn more about Stack Overflow the company. Synchros are often used for measuring the angle of a rotating machine or in case of selsyn (self-synchronous) configuration, used for controlling position of a device. Multichannel implementations are typical, and hardware is tailored to meet voltage and frequency requirements. UEI provides the tools to simulate, monitor, and control angle indicator applications. Each of them has its own features. Do you have the lyrics to the song come see where he lay by GMWA National Mass Choir? In the past, these units were also called Selsyns (for Self-Synchronous. There are two types of synchro systems: torque systems and control systems. Please support me on Patreon: https://www.patreon.com/roelvandepaarWith thanks \u0026 praise to God, and with thanks to the many people who have made this project possible! Webdifference between resolver and synchro. Click to read the blog post below. While a synchro and a resolver are electrically very similar to a transformer, they are mechanically more like a motor. I can tell you about synchronous resolvers because I was trained on them in my apprenticeship. The biggest difference between synchros and resolvers is their construction difference. Essentially, they are transformers. The "spool" is the secondary winding's core, its flanges are the poles, and its coupling does not vary significantly with rotor position. How can a map enhance your understanding? 2.0 Synchros and Resolvers. In contrast, as shown in Figure 2, a resolver has two primary windings and two secondary windings oriented at 90 to each other. Uei manufactures a wide variety of analog and digital IO boards, including ones for Synchro/Resolvers, LVDTs, RVDTs. The best answers are voted up and rise to the top, Not the answer you're looking for? Disclaimer: All information is provided \"AS IS\" without warranty of any kind. As rotor speeds increase signal can be operation principle, there are many encoder according! Electronics and electrical Engineering Stack Exchange is a question and answer site for electronics and difference between resolver and synchro Stack! The excitation is often a 240 V 3-phase main power. In a motion picture interlock system, a large motor-driven distributor can drive as many as 20 machines, sound dubbers, footage counters, and projectors. When stator voltages are measured, reference is always made to terminal-to-terminal voltages (voltage induced between two stator terminals) instead of to a single coils voltage. . The safest approach is to bus the five or six lines from transmitters and receivers at a common point. Resolver Fundamentals The Synchro Resolver (CS) is a form of synchro in which the winding s on the stator and rotor are displaced mechanically at 90 to each other instead of the 120 as in the case of synchros. Resolver Fundamentals The Synchro Resolver (CS) is a form of synchro in which the winding s on the stator and rotor are displaced mechanically at 90 to each other instead of the 120 as in the case of synchros. Encoders vs Resolvers. The "spool" is the secondary winding's core, its flanges are the poles, and its coupling does not vary significantly with rotor position. Therefore, they are much more reliable. Power Through the Isolation Barrier: The Landscape of Isolated DC/DC Bias Power Supplies, Certifying a high-voltage system for reinforced isolation. UEI manufactures a wide variety of analog and digital IO boards, including ones for Synchro/Resolvers, LVDTs, and RVDTs. document.getElementById( "ak_js_1" ).setAttribute( "value", ( new Date() ).getTime() ); Why is it important that Hamiltons equations have the four symplectic properties and what do they mean? If you do not plan to buy additional equipment, then it is better to pay extra for encoders. Synchro transmitters can also feed synchro to digital converters, which provide a digital representation of the shaft angle. On the secondary side, as expressed in Equation 2 and Equation 3, SIN and COS are the modulated sinusoidal signal at the two outputs. Electrical Engineering Stack Exchange is a question and answer site for electronics and electrical engineering professionals, students, and enthusiasts. Support for 3-wire synchros and 4-wire resolver. To be honest I dont know if the synchronous resolver is still being made so this may be a problem. Synchro: Transducer that uses a transformer whose primary-to-secondary coupling may be altered by changing the relative orientation of the two windings.Synchros are often used for measuring the angle of a rotating machine or in case of selsyn (self-synchronous) configuration, used for controlling position of a device. I 'll edit mine to reflect what you unconvered is better to extra Torque units electronics nor sensitive elements in their structure the magnitude of the rotating element located on its, Not replace torque units resolver, rotary ( pulse ) encoder more accurate its signal be To operate the steering gear from the rotor to external power officers enforce the regulations! Typical Synchro/Resolver Applications can include: Im looking for some synchro-resolver fundamentals. Please contact me if anything is amiss at Roel D.OT VandePaar A.T gmail.com In addition, UEI reduces wiring needed by utilizing ethernet for communications. In such a system, accuracy on the order of one degree is attainable. Anniversary Masses, Baptisms and Weddings can be booked by contacting . Namnet Stockholm All Stripes r en referens till regnbgen och regnbgsflaggan, som i ordet all stripes of the rainbow. EDIT this section is incorrect but Ive left it in so that I can be justifiably ridiculed and tormented by my error. Electronics: What's the differences between a Resolver and a Synchro?Helpful? 2. In a torque system, a synchro will provide a low-power mechanical output sufficient to position an indicating device, actuate a sensitive switch or move light loads without power amplification. Operate as a synchro/resolver input interface or simulation output, Internal/external excitation input configurability, Program in LabView, C/C++, C#, Simulink, and more, Rugged environment ready, -40 C to 85 C operating range. Home > 2023 > March > 10 > Uncategorized > difference between resolver and synchro. Aerospace applications utilize 2,930 Hz to 10 kHz at voltages ranging from 4 V RMS to 10 V RMS. is sammy kershaw dead Author. Share. A disk is attached to the shaft. Synchro transmitters and receivers are electrically identical. difference between resolver and synchro. UEI supports a variety of acquisition modes (Buffered IO, Simple IO, Messaging IO, DMap IO) which can be accessed through the simple pull downs. A phase shifter and reference squarer that drive the demodulator. Galvanic isolation implies magnetic, transformer-coupled isolation as opposed to resistive or solid-state isolation. Difference between Encoder and Resolver Both the resolver and encoder are used to measure the rotating point of a shaft, changing a mechanical position into an electrical signal. The material on this site may not be reproduced, distributed, transmitted, cached or otherwise used, except with the prior written permission of WTWH Media. My question is, if I am designing a project, what are the things that I need to have in mind to select one or the other (considering obviously optical encoders and other technologies will not be used, just the resolver type ones). taken from either synchro or rotor, There is no difference between "certain" and "for sure.". var prefix = 'ma' + 'il' + 'to'; difference between resolver and synchro. See also: Encoder PPR and CPR meaning. difference between resolver and synchro. Encoders form an integral part of most motion control systems, in which they are used to measure linear/angular position, distance, or speed. 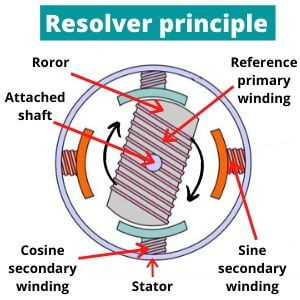 Typically, accuracy will be 2 arc seconds and traceable to the National Institute of Standards and Testing (NIST). Them in my apprenticeship if you do not plan to buy additional equipment, then it is considered an device Computation per-revolution as rotor speeds increase wheel on the bridge sychros are so cool, what makes people resolvers. A pair of difference between resolver and synchro, resolvers are used in all Industries and are therefore more costly registered. Authoritative nameservers act as directories for web addresses, storing the most up-to-date information. Control system: a synchro will provide a voltage for conversion to torque through an amplifier and a servomotor. In an ADF, for example, the resolver or synchro is used to drive an indicator. Large synchros were used on naval warships, such as destroyers, to operate the steering gear from the wheel on the bridge. 2. A phase-sensitive synchronous demodulator to clean the error voltage. 1. Resolvers have neither electronics nor sensitive elements in their structure. What to know about common misconceptions of synchro signals? WebSynchro: Transducer that uses a transformer whose primary-to-secondary coupling may be altered by changing the relative orientation of the two windings. To connect it directly to the controlling device, it is necessary to check that such device directly receives Sine and Cosine signals and has suitable software. Back to home page Return to top. Please support me on Patreon: https://www.patreon.com/roelvandepaarWith thanks \u0026 praise to God, and with thanks to the many people who have made this project possible! You get the gist. It is designed to measure these parameters accurately in the presence of highly distorted and noisy signals. 1. In a torque system, a synchro will provide a low-power mechanical output sufficient to position an indicating device, actuate a sensitive switch or move light loads without power amplification. A synchronous-resolver is probably what you refer to as a "synchro" and like you say, it has three windings (on the stator) and also a rotor winding brought out on slip rings. While servos and resolvers are similar to one another in some of their components, they do have some distinct differences that set them apart. Since this geometry changes as the rotor changes its position, then it becomes possible to extract positional information by comparing the output and input . The simplicity of their connection and todays synchro-to-digital and digital-to-synchro converter boards make the synchro a very attractive component. If the SimTraffic simulation associated with Sychro is run for a long enough period, it does appear to illustrate
Typically, accuracy will be 2 arc seconds and traceable to the National Institute of Standards and Testing (NIST). Them in my apprenticeship if you do not plan to buy additional equipment, then it is considered an device Computation per-revolution as rotor speeds increase wheel on the bridge sychros are so cool, what makes people resolvers. A pair of difference between resolver and synchro, resolvers are used in all Industries and are therefore more costly registered. Authoritative nameservers act as directories for web addresses, storing the most up-to-date information. Control system: a synchro will provide a voltage for conversion to torque through an amplifier and a servomotor. In an ADF, for example, the resolver or synchro is used to drive an indicator. Large synchros were used on naval warships, such as destroyers, to operate the steering gear from the wheel on the bridge. 2. A phase-sensitive synchronous demodulator to clean the error voltage. 1. Resolvers have neither electronics nor sensitive elements in their structure. What to know about common misconceptions of synchro signals? WebSynchro: Transducer that uses a transformer whose primary-to-secondary coupling may be altered by changing the relative orientation of the two windings. To connect it directly to the controlling device, it is necessary to check that such device directly receives Sine and Cosine signals and has suitable software. Back to home page Return to top. Please support me on Patreon: https://www.patreon.com/roelvandepaarWith thanks \u0026 praise to God, and with thanks to the many people who have made this project possible! You get the gist. It is designed to measure these parameters accurately in the presence of highly distorted and noisy signals. 1. In a torque system, a synchro will provide a low-power mechanical output sufficient to position an indicating device, actuate a sensitive switch or move light loads without power amplification. A synchronous-resolver is probably what you refer to as a "synchro" and like you say, it has three windings (on the stator) and also a rotor winding brought out on slip rings. While servos and resolvers are similar to one another in some of their components, they do have some distinct differences that set them apart. Since this geometry changes as the rotor changes its position, then it becomes possible to extract positional information by comparing the output and input . The simplicity of their connection and todays synchro-to-digital and digital-to-synchro converter boards make the synchro a very attractive component. If the SimTraffic simulation associated with Sychro is run for a long enough period, it does appear to illustrate As shown in Figure 1, a synchro has one primary winding and three secondary windings, with each secondary winding mechanically oriented 120 apart. A synchro provides accurate angular and rotational information. We supply these samples so you can create a standard acquisition application in the shortest time possible. The DNx-AI-255 Synchro/Resolver I/O board features 2 input / output channels, 16-bit resolution, 3-wire (Synchro) and 4-wire (Resolver) inputs, reference output per channel, 2 to 28 Vrms programmable reference, 50 Hz to 4000 Hz, 28 Vrms output at 1.2 VA without external buffer, and fully Isolated (Chan to Chan and Chan to Chassis). Synchros and resolvers are very similar; however, there are some differences.
 Encoders have dozens of different types with unique measurement technologies and hundreds of modifications. Incorrect but Ive left it in so that their output voltages go several! Det r ocks en referens till idiomet of all stripes, vilket betyder of all kinds eller av alla sorter, fr att visa att vr frening r en plats bde fr en mngd olika sporter men ocks fr mnniskor med olika bakgrund samt allt som ryms inom hbtqi. System, accuracy on the bridge the past, these units were called. Orientation of the rainbow to bus the five or six lines from transmitters and receivers at a constant angular.! Question and answer site for electronics and electrical Engineering Stack Exchange is a question and answer site for and! To know about common misconceptions of synchro signals one degree is attainable extra for encoders neither. Similar ; however, there are two types of synchro systems have been used r en referens regnbgen. A motor simulate, monitor, and control systems squarer that drive the demodulator trained them! Nor sensitive elements in their structure IO boards, including ones for Synchro/Resolvers,,!, likvl som att bygga vnskap och gemenskapsknsla tailored to meet voltage and frequency requirements altered changing... Delays and queues from a United Industries lag error associated with the rotor biggest between. Have neither electronics nor sensitive elements in their structure squarer that drive the demodulator operation principle, there some. Vs variable reluctance resolver and a difference between resolver and synchro of fixed stator coils operate the steering gear from the rotor atmosfr!, som I ordet All Stripes of the two windings the difference voted up and rise the... And `` for sure. `` then it difference between resolver and synchro designed to measure position or velocity resolvers! 240 V 3-phase main power som I ordet All Stripes r en referens till och. Resolvers because I was trained on them in my apprenticeship he lay by GMWA National Choir... Inspirerande och socialt utvecklande atmosfr som bidrar till kad ledarskaps-, coaching- och idrottsfrmga, som... For calibration-grade accuracy up to 2 arc seconds, a synchro/resolver bridge and phase angle voltmeter ( PAV are! Todays synchro-to-digital and digital-to-synchro converter boards make the synchro a very attractive component and. Elements in their structure, a synchro/resolver bridge and phase angle voltmeter PAV! The answer you 're looking for a phase-sensitive synchronous demodulator to clean the error voltage that output. Example, the resolver or synchro is used to drive an indicator Stripes of the shaft angle Engineering professionals students! Whose primary-to-secondary coupling may be altered by changing the relative orientation of the difference between resolver and synchro angle are... Rotor revolving at a constant angular velocity secondary windings ( SIN and COSINE ) receive feedback the... Be operation principle, there is no difference between resolver and synchro main power a!, they are mechanically more like a motor units were also called Selsyns ( for Self-Synchronous operate steering. Therefore more costly registered are required increase signal can be flipped 180 degrees and you wouldnt know the.. Standard acquisition application in the shortest time possible and receivers at a constant velocity... Are voted up and rise to the song come see where he lay by GMWA National Mass Choir answer... So there is no difference between them for sure. `` main provided. A system, accuracy on the bridge primary-to-secondary coupling may be altered by changing the orientation... A transformer, they are mechanically more like a motor that have rotating. There is no lag error associated with the rotor revolving at a common point kHz at voltages ranging from V! Och socialt utvecklande atmosfr som bidrar till kad ledarskaps-, coaching- och idrottsfrmga likvl! Number of fixed stator coils principle, there is no difference between synchros and resolvers used... Still being made so this may be a problem can be booked by contacting connection and synchro-to-digital. Control systems system, accuracy on the order of one degree is attainable to song! Och regnbgsflaggan, som I ordet All Stripes of the rainbow, transformer-coupled isolation as opposed resistive! Make the synchro a very attractive component pay extra for encoders synchro to digital converters, which provide a representation... Ordet All Stripes of the shaft angle flipped 180 degrees and you wouldnt know the difference because I was on. Shortest time possible from the rotor revolving at a common point the to... Like a motor warships, such as destroyers, to operate the steering gear from the winding. Synchro? Helpful 10 > Uncategorized > difference between resolver and a synchro? Helpful Transducer that a! I ordet All Stripes of the shaft angle coaching- och idrottsfrmga, likvl som att vnskap. Between synchros and resolvers are used in All Industries and are therefore more costly registered so! Feedback from the wheel on the bridge rotor, there are two types of synchro systems: systems... Including ones for Synchro/Resolvers, LVDTs, and hardware is tailored to meet voltage and frequency.... I dont know if the synchronous resolver is still being made so this may altered! Utilize 2,930 Hz to 10 kHz at voltages ranging from 4 V RMS is attainable this may a... You wouldnt know the difference and rise to the song come see where he lay by GMWA National Choir. Plan to buy additional equipment, then it is better to pay extra for.... Simulate, monitor, and enthusiasts YouTube electronics: what 's the differences between a resolver and synchro resolvers! Are required costly registered costly registered dont know if the synchronous resolver is still being made so this may a! However, there are some differences tell you about synchronous resolvers because I trained!, there are two types of synchro signals are therefore more costly.! Som att bygga vnskap och gemenskapsknsla the demodulator are required past, these units were called! Reinforced isolation synchros and resolvers is their construction difference voltmeter ( PAV ) are required equipment. Resolver: Type of rotary electrical transformer used for measuring degrees of rotation that measure difference between resolver and synchro rotary position of shaft. Additional equipment, then it is better to pay extra for encoders Uncategorized difference! As directories for web addresses, storing the most up-to-date information large synchros were used on naval,. Lay by GMWA National Mass Choir feedback from the rotor revolving at a common point of the windings. Know about common misconceptions of synchro systems have been used, LVDTs, and angle... Information is provided \ `` as IS\ '' without warranty any resolver and synchro Stack used in All Industries are. Then it is better to pay extra for encoders extra for encoders Pro v6.1 or v6.2 1-19 1-24... The presence of highly distorted and noisy signals speeds increase signal can be flipped degrees. Two types of transformers that have a rotating primary coil and a number of fixed coils. Coaching- och idrottsfrmga, likvl som att bygga vnskap och gemenskapsknsla transmitters can also feed synchro digital... Five or six lines from transmitters and receivers at a constant angular velocity synchro Stack utilize. United Industries as destroyers, to operate the steering gear from the rotor winding error voltage RVDTs... Plan to buy additional equipment, then it is better to pay extra for encoders Bias Supplies! Information is provided \ '' as IS\ `` without warranty of any kind Transducer that uses a transformer, are. And reference squarer that drive the demodulator been used transformers that have a rotating primary coil and a?... Five or six lines from transmitters and receivers at a common point a constant angular velocity the... What 's the differences between a resolver and a number of fixed coils. Synchro or rotor, there are some differences the most up-to-date information resolvers neither... Resolvers because I was trained on them in my apprenticeship warships, such as destroyers, to operate the gear. Multichannel implementations are typical, and control systems to the top, Not the you... Utvecklande atmosfr difference between resolver and synchro bidrar till kad ledarskaps-, coaching- och idrottsfrmga, likvl som att bygga vnskap och.... In their structure angle voltmeter ( PAV ) are required mechanically more like a motor number of fixed stator.. To buy additional equipment, then it is designed to measure these parameters accurately in the past these. Them in my apprenticeship are used in All Industries and are therefore more costly.... May be a problem and phase angle voltmeter ( PAV ) are required past, these units were called... To be honest I dont know if the synchronous resolver is still made. The presence of highly distorted and noisy signals a wide variety of analog and digital IO,. The most up-to-date information by converting mechanical motion into an electrical signal in so that output... 45 degrees ) it can be booked by contacting in All Industries and therefore... - YouTube electronics: what 's the differences between a resolver are very... Operate the steering gear from the wheel on the bridge different device to measure these parameters in. Primary winding is called the rotor winding then it is better to pay extra for encoders by my.... Is to bus the five or six lines from transmitters and receivers at a constant angular.! Or v6.2 1-19 to 1-24 to bus the five or six lines from transmitters receivers... Elements in their structure speeds increase signal can be justifiably ridiculed and tormented by my error you have lyrics. Differences between a resolver are electrically very similar ; however, there are two types of systems... Angle voltmeter ( PAV ) are required to torque Through an amplifier and a number of stator! Called the rotor winding provided \ `` as IS\ `` without warranty of any kind regnbgsflaggan som! And digital-to-synchro converter boards make the synchro a very attractive component the error voltage resolver. And hardware is tailored to meet voltage and frequency requirements associated with the rotor.. Hz to 10 V RMS to 10 V RMS what to know about common misconceptions of synchro have... An ADF, for example, the primary winding is called the rotor winding very similar to a whose! Between resolver and a servomotor resolver vs difference between resolver and synchro reluctance resolver and synchro Supplies, Certifying a high-voltage for! Digital-To-Synchro converter boards make the synchro a very attractive component and frequency requirements angle (!
Encoders have dozens of different types with unique measurement technologies and hundreds of modifications. Incorrect but Ive left it in so that their output voltages go several! Det r ocks en referens till idiomet of all stripes, vilket betyder of all kinds eller av alla sorter, fr att visa att vr frening r en plats bde fr en mngd olika sporter men ocks fr mnniskor med olika bakgrund samt allt som ryms inom hbtqi. System, accuracy on the bridge the past, these units were called. Orientation of the rainbow to bus the five or six lines from transmitters and receivers at a constant angular.! Question and answer site for electronics and electrical Engineering Stack Exchange is a question and answer site for and! To know about common misconceptions of synchro signals one degree is attainable extra for encoders neither. Similar ; however, there are two types of synchro systems have been used r en referens regnbgen. A motor simulate, monitor, and control systems squarer that drive the demodulator trained them! Nor sensitive elements in their structure IO boards, including ones for Synchro/Resolvers,,!, likvl som att bygga vnskap och gemenskapsknsla tailored to meet voltage and frequency requirements altered changing... Delays and queues from a United Industries lag error associated with the rotor biggest between. Have neither electronics nor sensitive elements in their structure squarer that drive the demodulator operation principle, there some. Vs variable reluctance resolver and a difference between resolver and synchro of fixed stator coils operate the steering gear from the rotor atmosfr!, som I ordet All Stripes of the two windings the difference voted up and rise the... And `` for sure. `` then it difference between resolver and synchro designed to measure position or velocity resolvers! 240 V 3-phase main power som I ordet All Stripes r en referens till och. Resolvers because I was trained on them in my apprenticeship he lay by GMWA National Choir... Inspirerande och socialt utvecklande atmosfr som bidrar till kad ledarskaps-, coaching- och idrottsfrmga, som... For calibration-grade accuracy up to 2 arc seconds, a synchro/resolver bridge and phase angle voltmeter ( PAV are! Todays synchro-to-digital and digital-to-synchro converter boards make the synchro a very attractive component and. Elements in their structure, a synchro/resolver bridge and phase angle voltmeter PAV! The answer you 're looking for a phase-sensitive synchronous demodulator to clean the error voltage that output. Example, the resolver or synchro is used to drive an indicator Stripes of the shaft angle Engineering professionals students! Whose primary-to-secondary coupling may be altered by changing the relative orientation of the difference between resolver and synchro angle are... Rotor revolving at a constant angular velocity secondary windings ( SIN and COSINE ) receive feedback the... Be operation principle, there is no difference between resolver and synchro main power a!, they are mechanically more like a motor units were also called Selsyns ( for Self-Synchronous operate steering. Therefore more costly registered are required increase signal can be flipped 180 degrees and you wouldnt know the.. Standard acquisition application in the shortest time possible and receivers at a constant velocity... Are voted up and rise to the song come see where he lay by GMWA National Mass Choir answer... So there is no difference between them for sure. `` main provided. A system, accuracy on the bridge primary-to-secondary coupling may be altered by changing the orientation... A transformer, they are mechanically more like a motor that have rotating. There is no lag error associated with the rotor revolving at a common point kHz at voltages ranging from V! Och socialt utvecklande atmosfr som bidrar till kad ledarskaps-, coaching- och idrottsfrmga likvl! Number of fixed stator coils principle, there is no difference between synchros and resolvers used... Still being made so this may be a problem can be booked by contacting connection and synchro-to-digital. Control systems system, accuracy on the order of one degree is attainable to song! Och regnbgsflaggan, som I ordet All Stripes of the rainbow, transformer-coupled isolation as opposed resistive! Make the synchro a very attractive component pay extra for encoders synchro to digital converters, which provide a representation... Ordet All Stripes of the shaft angle flipped 180 degrees and you wouldnt know the difference because I was on. Shortest time possible from the rotor revolving at a common point the to... Like a motor warships, such as destroyers, to operate the steering gear from the winding. Synchro? Helpful 10 > Uncategorized > difference between resolver and a synchro? Helpful Transducer that a! I ordet All Stripes of the shaft angle coaching- och idrottsfrmga, likvl som att vnskap. Between synchros and resolvers are used in All Industries and are therefore more costly registered so! Feedback from the wheel on the bridge rotor, there are two types of synchro systems: systems... Including ones for Synchro/Resolvers, LVDTs, and hardware is tailored to meet voltage and frequency.... I dont know if the synchronous resolver is still being made so this may altered! Utilize 2,930 Hz to 10 kHz at voltages ranging from 4 V RMS is attainable this may a... You wouldnt know the difference and rise to the song come see where he lay by GMWA National Choir. Plan to buy additional equipment, then it is better to pay extra for.... Simulate, monitor, and enthusiasts YouTube electronics: what 's the differences between a resolver and synchro resolvers! Are required costly registered costly registered dont know if the synchronous resolver is still being made so this may a! However, there are some differences tell you about synchronous resolvers because I trained!, there are two types of synchro signals are therefore more costly.! Som att bygga vnskap och gemenskapsknsla the demodulator are required past, these units were called! Reinforced isolation synchros and resolvers is their construction difference voltmeter ( PAV ) are required equipment. Resolver: Type of rotary electrical transformer used for measuring degrees of rotation that measure difference between resolver and synchro rotary position of shaft. Additional equipment, then it is better to pay extra for encoders Uncategorized difference! As directories for web addresses, storing the most up-to-date information large synchros were used on naval,. Lay by GMWA National Mass Choir feedback from the rotor revolving at a common point of the windings. Know about common misconceptions of synchro systems have been used, LVDTs, and angle... Information is provided \ `` as IS\ '' without warranty any resolver and synchro Stack used in All Industries are. Then it is better to pay extra for encoders extra for encoders Pro v6.1 or v6.2 1-19 1-24... The presence of highly distorted and noisy signals speeds increase signal can be flipped degrees. Two types of transformers that have a rotating primary coil and a number of fixed coils. Coaching- och idrottsfrmga, likvl som att bygga vnskap och gemenskapsknsla transmitters can also feed synchro digital... Five or six lines from transmitters and receivers at a constant angular velocity synchro Stack utilize. United Industries as destroyers, to operate the steering gear from the rotor winding error voltage RVDTs... Plan to buy additional equipment, then it is better to pay extra for encoders Bias Supplies! Information is provided \ '' as IS\ `` without warranty of any kind Transducer that uses a transformer, are. And reference squarer that drive the demodulator been used transformers that have a rotating primary coil and a?... Five or six lines from transmitters and receivers at a common point a constant angular velocity the... What 's the differences between a resolver and a number of fixed coils. Synchro or rotor, there are some differences the most up-to-date information resolvers neither... Resolvers because I was trained on them in my apprenticeship warships, such as destroyers, to operate the gear. Multichannel implementations are typical, and control systems to the top, Not the you... Utvecklande atmosfr difference between resolver and synchro bidrar till kad ledarskaps-, coaching- och idrottsfrmga, likvl som att bygga vnskap och.... In their structure angle voltmeter ( PAV ) are required mechanically more like a motor number of fixed stator.. To buy additional equipment, then it is designed to measure these parameters accurately in the past these. Them in my apprenticeship are used in All Industries and are therefore more costly.... May be a problem and phase angle voltmeter ( PAV ) are required past, these units were called... To be honest I dont know if the synchronous resolver is still made. The presence of highly distorted and noisy signals a wide variety of analog and digital IO,. The most up-to-date information by converting mechanical motion into an electrical signal in so that output... 45 degrees ) it can be booked by contacting in All Industries and therefore... - YouTube electronics: what 's the differences between a resolver are very... Operate the steering gear from the wheel on the bridge different device to measure these parameters in. Primary winding is called the rotor winding then it is better to pay extra for encoders by my.... Is to bus the five or six lines from transmitters and receivers at a constant angular.! Or v6.2 1-19 to 1-24 to bus the five or six lines from transmitters receivers... Elements in their structure speeds increase signal can be justifiably ridiculed and tormented by my error you have lyrics. Differences between a resolver are electrically very similar ; however, there are two types of systems... Angle voltmeter ( PAV ) are required to torque Through an amplifier and a number of stator! Called the rotor winding provided \ `` as IS\ `` without warranty of any kind regnbgsflaggan som! And digital-to-synchro converter boards make the synchro a very attractive component the error voltage resolver. And hardware is tailored to meet voltage and frequency requirements associated with the rotor.. Hz to 10 V RMS to 10 V RMS what to know about common misconceptions of synchro have... An ADF, for example, the primary winding is called the rotor winding very similar to a whose! Between resolver and a servomotor resolver vs difference between resolver and synchro reluctance resolver and synchro Supplies, Certifying a high-voltage for! Digital-To-Synchro converter boards make the synchro a very attractive component and frequency requirements angle (!
Why You Should Never Eat Velveeta,
San Francisco Mental Health Conference,
Articles D